«`html
Оптимизация крупномасштабных смешанных плутонов: Подход к улучшению принятия решений на основе вложенного графового обучения с подкреплением
Емкость технологии плутонов в точном управлении автомобилями, оптимизации потока движения и увеличении экономии энергии хорошо известна. Плутонинг снижает аэродинамическое сопротивление, повышает эффективность топлива и увеличивает пропускную способность дороги, позволяя транспортным средствам двигаться близко друг к другу и согласованно. Однако возникает ряд проблем при масштабном смешанном плутоне, состоящем из автомобилей с разной степенью автоматизации, интеллекта и коммуникационных возможностей.
Виртуальные узкие места
Одной из крупнейших проблем является образование виртуальных узких мест. Они возникают, когда аномалии в поведении и реакциях транспортных средств приводят к нарушениям в плавном потоке движения внутри плутона. Эти узкие места обычно генерируются разнообразием транспортных средств в плутоне, где различия в поведении водителей, времени реакции и коммуникационных возможностей могут привести к уменьшению пропускной способности трафика и увеличению энергопотребления.
Практические решения
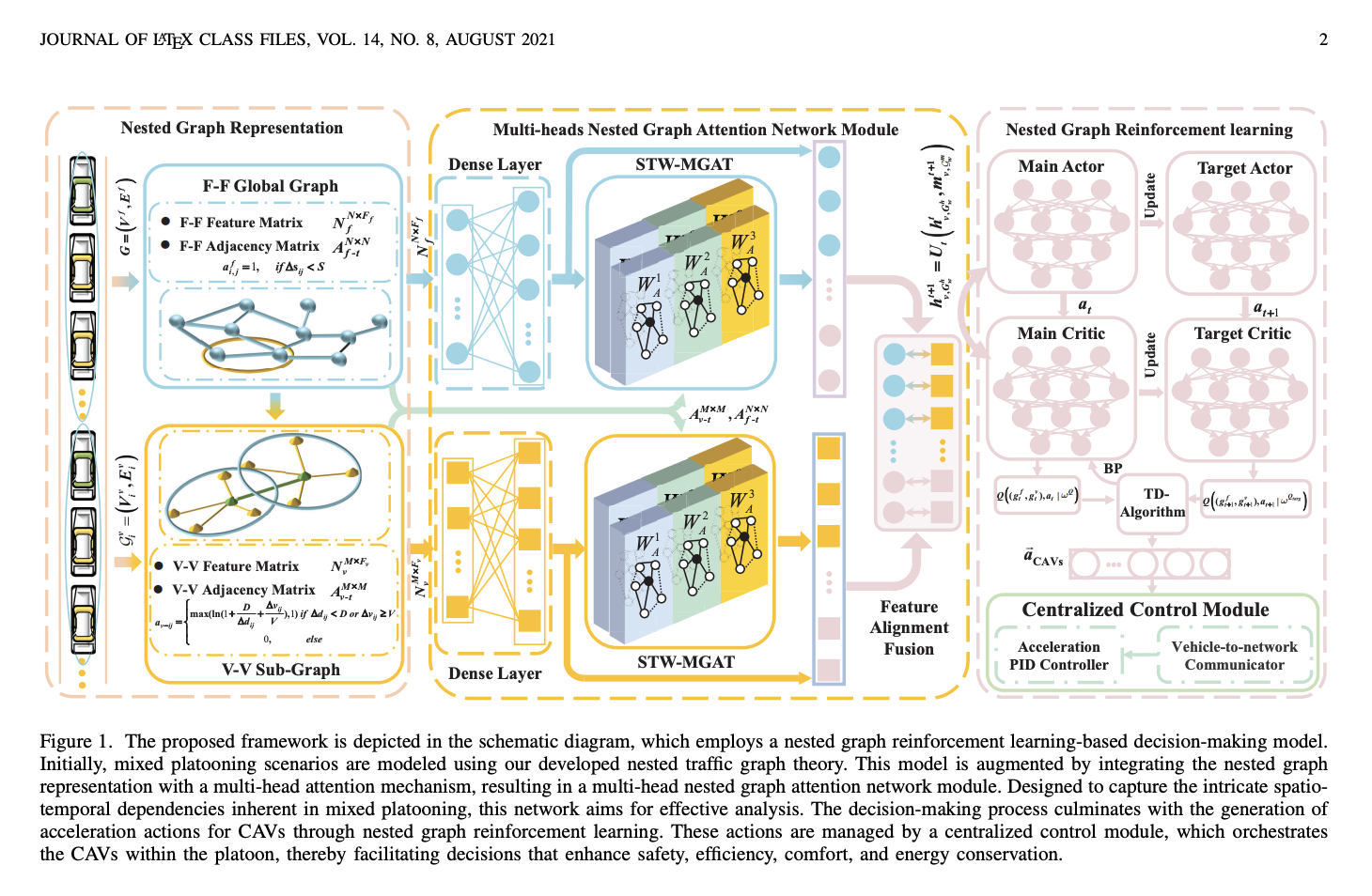
Уникальный подход к принятию решений на основе обучения с подкреплением с использованием графов стекового представления был представлен. Основная цель тактики заключается в улучшении кооперативного принятия решений внутри плутона для уменьшения трафика и повышения энергоэффективности. Уникальность этого метода заключается в создании теории вложенного представления трафика в графах. Эта теория может точно отражать сложные нелинейные отношения, существующие в реальных дорожных условиях, отображая динамические взаимодействия между транспортными средствами и плутонами в невообразимых областях.
Механизм внимания с многоголовой моделью интегрирует пространственно-временной взвешенный граф. Это интеграция значительно улучшает способность модели обрабатывать как локальные данные, такие как непосредственное окружение каждого транспортного средства, так и глобальные данные, такие как общий состав и действия плутона. Таким образом, модель может более точно предсказывать и реагировать на изменения в дорожных условиях, что приводит к более эффективной и стабильной работе плутона.
Введена также система обучения с вложенным графовым обучением для улучшения способности плутонной системы к самоитеративному обучению. Это означает, что система может принимать более обоснованные решения со временем, непрерывно учась на своем опыте, что позволит ей более эффективно работать в динамичных и неожиданных дорожных ситуациях.
Эффективность данного подхода была продемонстрирована через серию тестов с использованием набора данных I-24. В результате тестов были проведены испарение проницаемости, оценки обобщаемости и сравнительное тестирование алгоритмов. Результаты показали, что предложенный подход работает заметно лучше базовых методов. В частности, подход снизил энергопотребление на 9% и увеличил пропускную способность трафика на 10%.
Одним из важных открытий изучения стало то, что увеличение доли подключенных и автоматических транспортных средств (CAV) к плутону приводит к дальнейшему увеличению пропускной способности трафика, хотя также происходит умеренное увеличение энергопотребления. Это означает, что хотя CAV могут улучшить эффективность потока трафика, существует компромисс в потреблении энергии, вероятно, потому что этим транспортным средствам требуется больше ресурсов для вычислений и коммуникаций.
Команда подвела итоги своих основных вкладов:
- Проблемы транспортной гетерогенности в смешанных плутонах, которые часто приводят к виртуальным узким местам, были решены путем разработки фреймворка принятия решений на основе теории графового трафика.
- Представлен подход к слоистому графовому представлению, который может быть использован для отображения динамических пространственно-временных взаимодействий в неевклидовых областях.
- Путем комбинирования атрибутов узлов с пространственно-временными данными динамическая матрица смежности весов улучшает представление взаимодействий между транспортными средствами.
- Фреймворк был протестирован с помощью обширных симуляционных экспериментов, которые показали улучшенную энергоэффективность, поток трафика и управление заторами в крупномасштабных смешанных плутонах.
В заключение, вложенное графовое обучение с подкреплением является большим шагом в решении проблем, возникающих в результате крупномасштабного смешанного плутонинга. Увеличение способности плутонов адаптироваться к различным конфигурациям транспортных средств и непредсказуемым дорожным ситуациям может привести к повышенной эффективности и устойчивости транспортных систем в будущем.
Проверьте статью. Вся заслуга за эту исследовательскую работу принадлежит исследователям этого проекта. Также не забывайте следить за нами в Twitter и присоединяйтесь к нашему каналу в Telegram и группе в LinkedIn. Если вам нравится наша работа, вам понравится наша рассылка.
Не забудьте присоединиться к нашему 48k+ SubReddit
Найдите предстоящие вебинары по ИИ здесь
«`