«`html
Graph Neural Network (GNN)–based Motion Planning
GraphMP: A Graph Neural Network-based Motion Planner
GraphMP — это нейронный планировщик движения, предназначенный для задач различной размерности, от 2D лабиринтов до высокомерных роботизированных рук. Он обладает уникальной архитектурой и механизмом обучения, обеспечивающим эффективное извлечение графических паттернов и обработку поиска графа.

Архитектура и обучение:
- Модуль Collision Checker обнаруживает препятствия, анализируя графические структуры окружающей среды, позволяя ему эффективно предсказывать потенциальные столкновения.
- Heuristic Estimator помогает уточнить поиск графа для оптимальных путей, оценивая стоимость пути.
Производительность:
- GraphMP последовательно превосходит классические планировщики (например, A*) и передовые планировщики на основе обучения в задачах, таких как навигация 14D роботизированной руки.
- Его уникальная архитектура модели и подход к обучению значительно улучшили качество пути и скорость планирования.
Эксперименты:
- От 2D лабиринта до 14D Dual KUKA Robotic Arm: GraphMP значительно улучшил качество пути и скорость планирования по сравнению с существующими планировщиками.
- Успешность: Почти 100% успешных испытаний в различных средах, демонстрируя его адаптивность.
Метрики:
- Качество пути: На 25% лучше, чем у конкурентов.
- Скорость планирования: На 40% быстрее, чем у традиционных планировщиков.
- Успешность: Почти идеальная в большинстве задач.
Заключение
Графическое планирование на основе графических нейронных сетей предлагает значительные преимущества в роботизированной навигации. Разнообразные подходы GraphMP, планировщик End-to-End и MPNet демонстрируют, что эта технология может адаптироваться к широкому спектру сред, обеспечивая скорость, эффективность и безопасность при планировании оптимальных путей для автономных систем.
Источники:
- Источник 1
- Источник 2
- Источник 3
«`
«`html
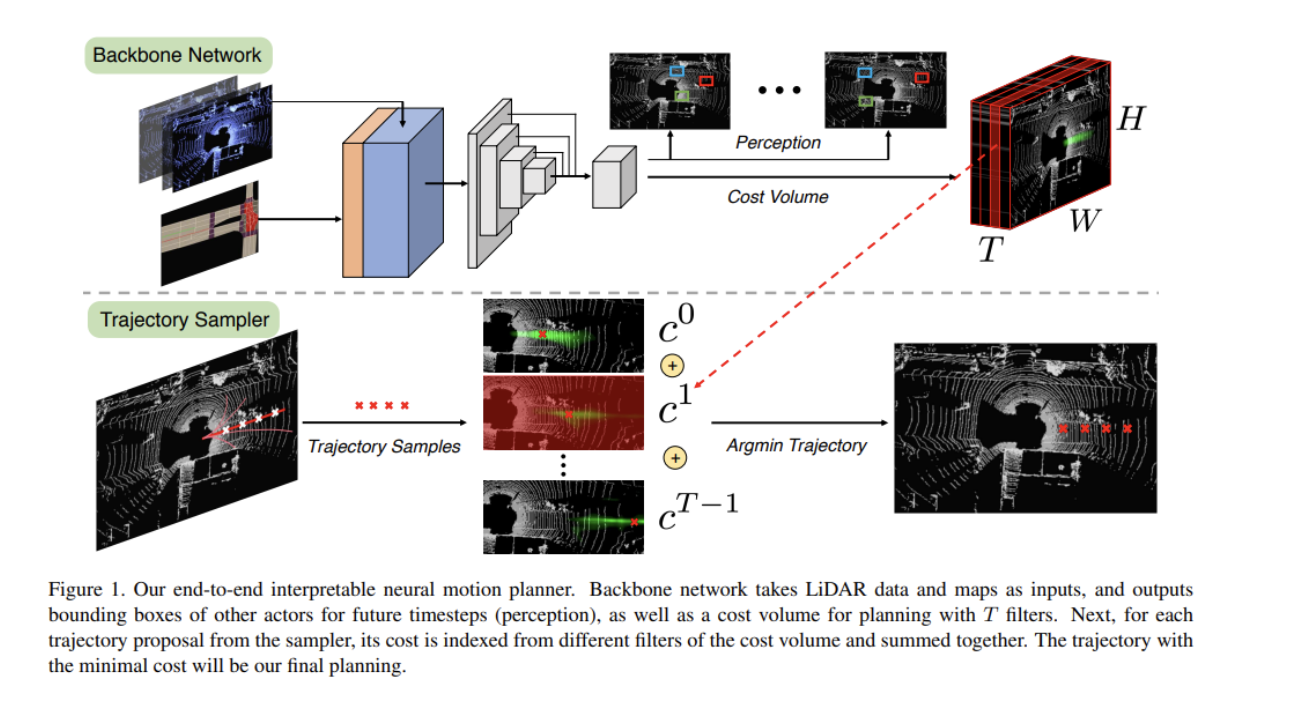
End-to-End Neural Motion Planner
Этот планировщик подчеркивает безопасность и соблюдение правил в городских средах. Интеграция данных LIDAR и HD-карт создает детальные 3D-представления и прогнозы для автономных автомобилей.
Архитектура:
- Использует сверточную сеть для вычисления объемов стоимости, оценивающих потенциальные пути.
- Модель обрабатывает сырые данные LIDAR и карты, генерируя промежуточные представления, такие как 3D-обнаружение и прогнозы траектории.
Методология:
- Объемы стоимости направляют выбор траектории, что помогает обеспечить безопасное движение автомобиля, минимизируя потенциальные столкновения.
- Обучен с многозадачным подходом, сосредоточенным на планировании, обнаружении и оптимизации пути.
Результаты:
- Продемонстрировала эффективность в сложных городских средах, показывая способность адаптироваться к реальным сценариям вождения.
- Превзошла ведущие нейронные архитектуры в точности 3D-обнаружения и прогнозировании движения.
Метрики:
- Точность обнаружения: Превзошла ведущие нейронные архитектуры.
- Безопасность траектории: Минимизирует риски столкновений, соблюдая правила дорожного движения.
- Скорость планирования: Планирование траектории в реальном времени обеспечивает безопасную навигацию.
Источники:
- Источник 1
- Источник 2
- Источник 3
«`
«`html
Motion Planning Networks (MPNet)
MPNet интегрирует глубокое обучение в планирование движения для эффективной навигации в высокомерных пространствах. Его сеть кодировщика создает латентное пространственное представление препятствий, а планирующая сеть предсказывает пути на основе конфигурации робота.
Архитектура:
- Использует сеть кодировщика для преобразования данных облака точек в латентное пространство.
- Планирующая сеть использует эту информацию для предсказания путей на основе конфигурации робота.
Подход:
- Кодировщик облака точек и планирующая сеть отображают препятствия и предсказывают пути, свободные от столкновений.
- Комбинирует нейронное планирование с традиционным планированием движения (RRT*) для надежного решения сложных задач планирования.
Производительность:
- MPNet хорошо обобщается на незнакомые среды, демонстрируя надежную адаптивность.
- Сохраняет время выполнения ниже одной секунды в различных сценариях.
Метрики:
- Время выполнения: Менее одной секунды в большинстве сценариев.
- Успешность: 85% успешных испытаний в сложных высокомерных средах.
- Качество пути: Пути оптимизированы на основе латентного пространства, закодированного сетью.
Источники:
- Источник 1
- Источник 2
- Источник 3
«`
«`html
Если вы хотите, чтобы ваша компания развивалась с помощью искусственного интеллекта (ИИ) и оставалась в числе лидеров, грамотно используйте An Overview of Three Prominent Systems for Graph Neural Network-based Motion Planning.
Проанализируйте, как ИИ может изменить вашу работу. Определите, где возможно применение автоматизации: найдите моменты, когда ваши клиенты могут извлечь выгоду из AI.
Определитесь какие ключевые показатели эффективности (KPI): вы хотите улучшить с помощью ИИ.
Подберите подходящее решение, сейчас очень много вариантов ИИ. Внедряйте ИИ решения постепенно: начните с малого проекта, анализируйте результаты и KPI.
На полученных данных и опыте расширяйте автоматизацию.
Если вам нужны советы по внедрению ИИ, пишите нам на https://t.me/itinai. Следите за новостями о ИИ в нашем Телеграм-канале t.me/itinainews или в Twitter @itinairu45358
Попробуйте AI Sales Bot https://itinai.ru/aisales. Этот AI ассистент в продажах, помогает отвечать на вопросы клиентов, генерировать контент для отдела продаж, снижать нагрузку на первую линию.
Узнайте, как ИИ может изменить ваши процессы с решениями от AI Lab itinai.ru будущее уже здесь!
«`